This is simple Arduino based 650W BLDC motor(with Hall sensors) controller. Designed with KiCAD. This controller has version V0.1, which means it is still under development. In addition, the project supports Field-Oriented Control (FOC), which is implemented using the SimpleFOC library.
All of this together enables a wide range of functions, such as precise rotor positioning (servo mode), phase current control, speed control, and much, much more. Source code files (HW or SW) may change over time.
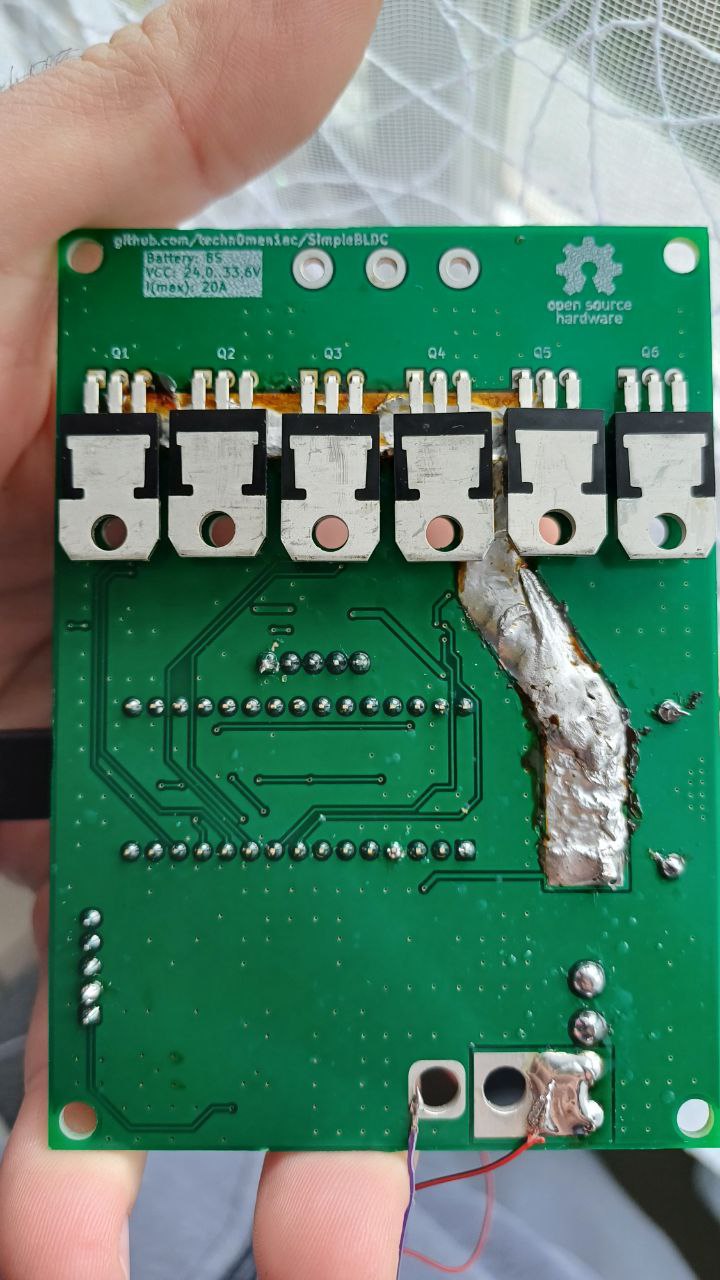
Simple BLDC 3-Phase BLDC motor driver specs:
- Battery: 8S
- VCC: 24.0V to 33.6V
- I(max): 20A
- Сurrent measurements per phase
The device has the following features:
- XT60 power connector;
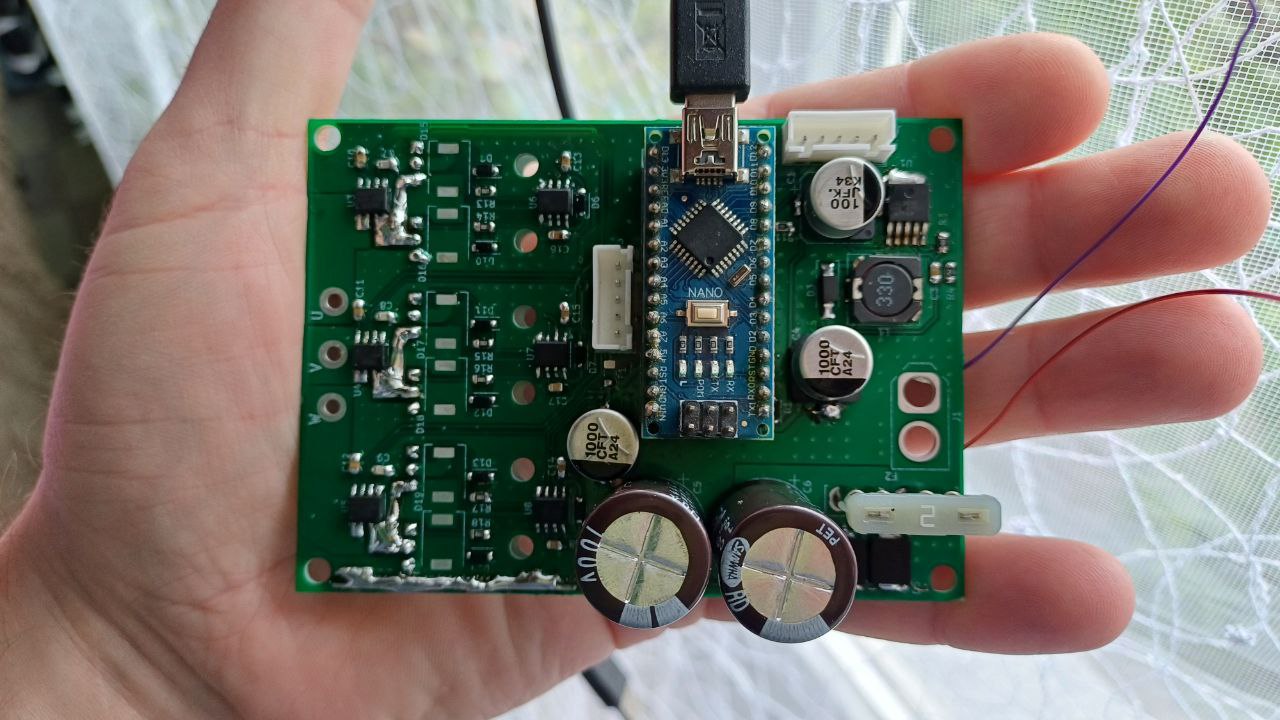
- Arduino Nano V3.0 main controller;
- Overcurrent protection (fuse);
- Reverse polarity protection;
- The ability to work with non-collector motors via Hall sensors (electric scooter or electric bicycle);
- Monitoring and control of the current of each phase (current is measured in both positive and negative directions);
- Current control by PWM, operating frequency 16/32 kHz;
- Has a connector for connecting a traction control potentiometer and a reverse button.
- Publication of the project under the MIT license.
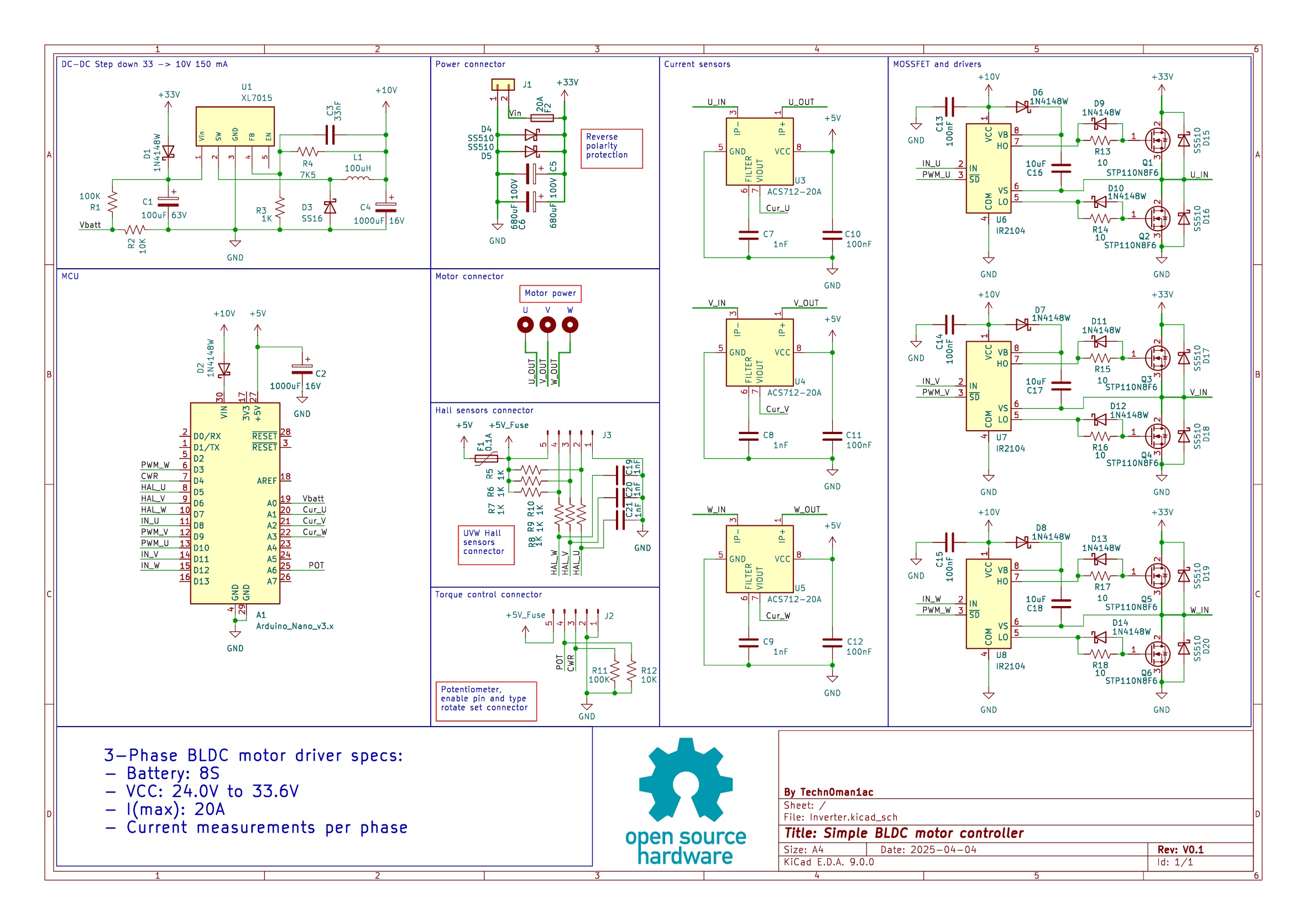
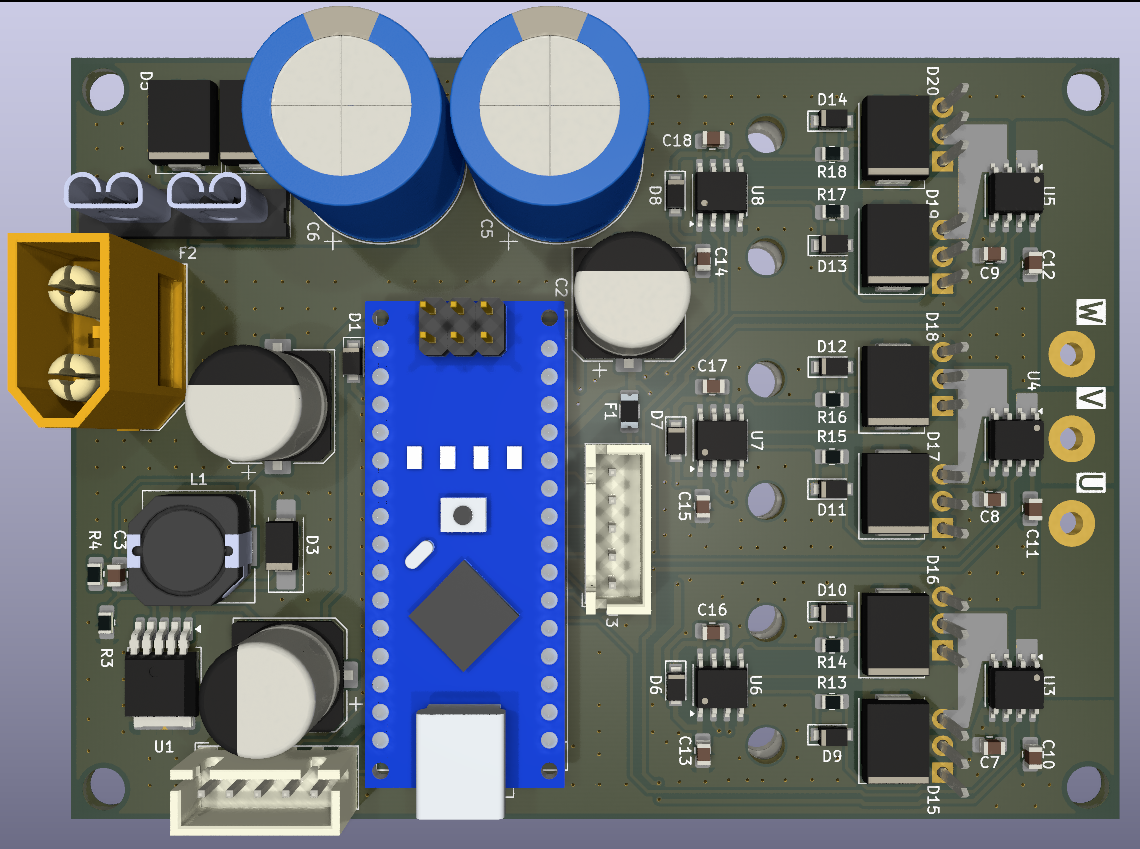
The device has 3 drivers for mosfet transistors, as well as 3 current sensors based on the Hall effect, which measure both in the positive and negative directions. The use of 3 sensors is the reason for the development of the device for regenerative braking.
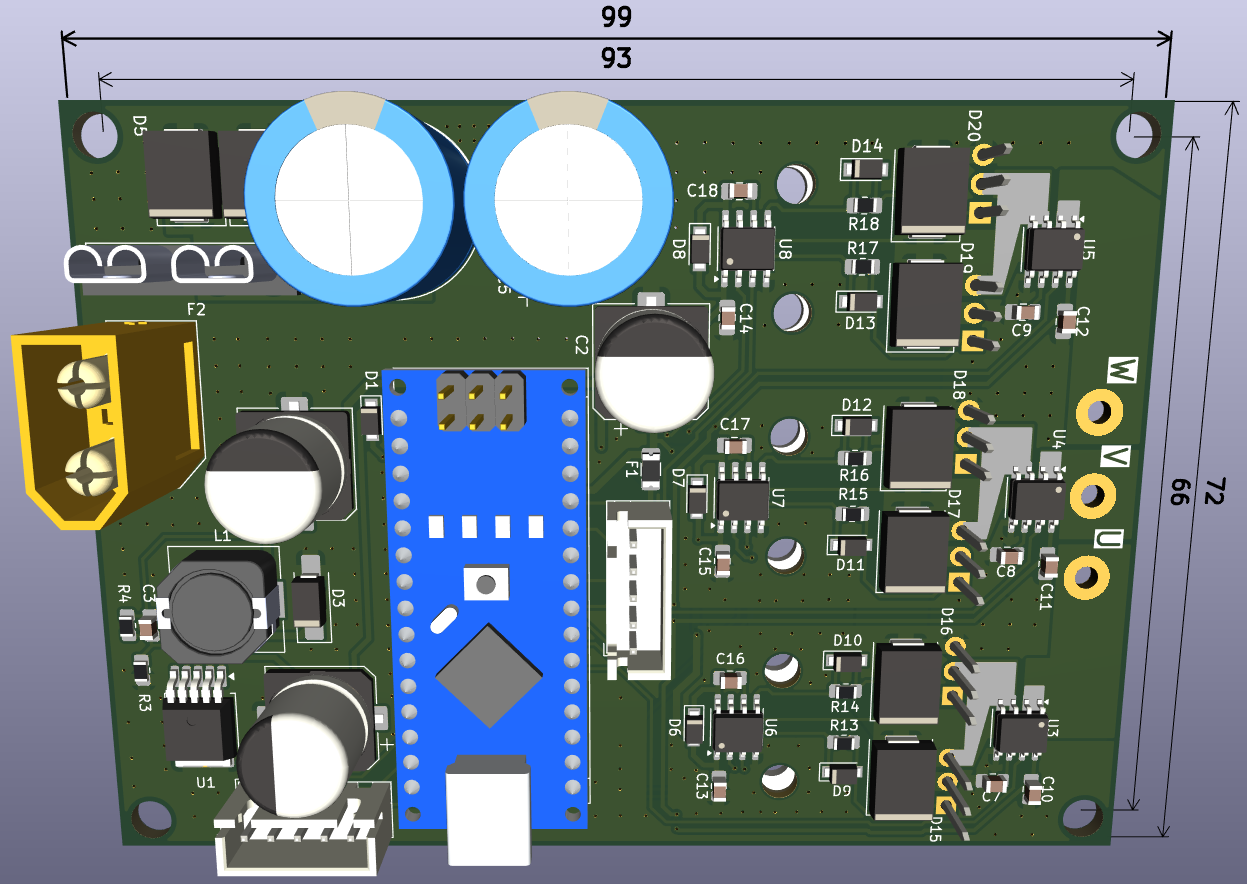
The board consists of two layers: top and bottom. All the main parts are located on the top layer.
The bottom layer contains mainly earth and power tracks.
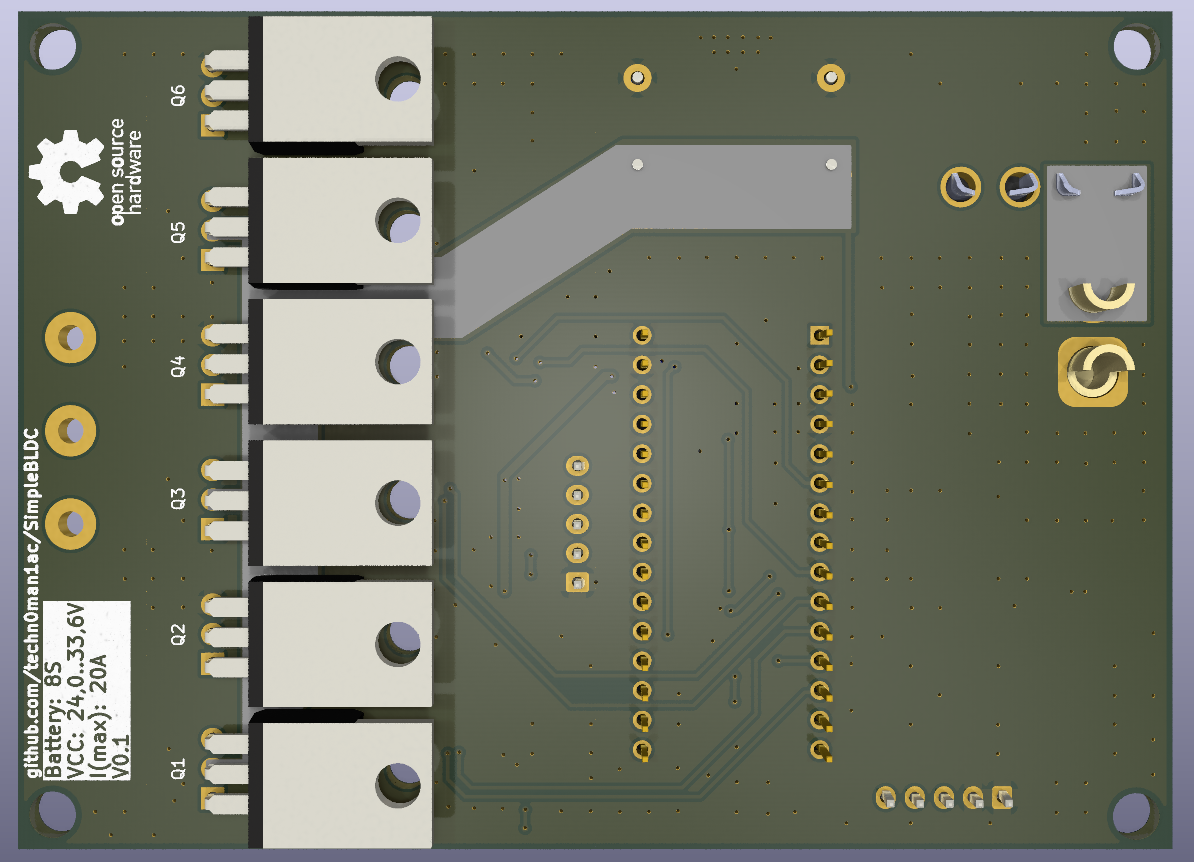
Board sizes is 72 x 99 mm: